| 型 号 Model: |
HL-3640-C001 |
|
产品名称 Product Name: |
7.4V 40kg单轴恒力总线舵机/7.4V 40kg.cm Single shaft Constant Force Serial Bus Servo |
| 存储温度 Storage Temperature Range | -30℃~80℃ |
| 运行温度 Operating Temperature Range: | -10℃~60℃ |
| 温度 Temperature Range: | 25℃ ±5℃ |
| 湿度 Humidity Range: | 65%±10% |
|
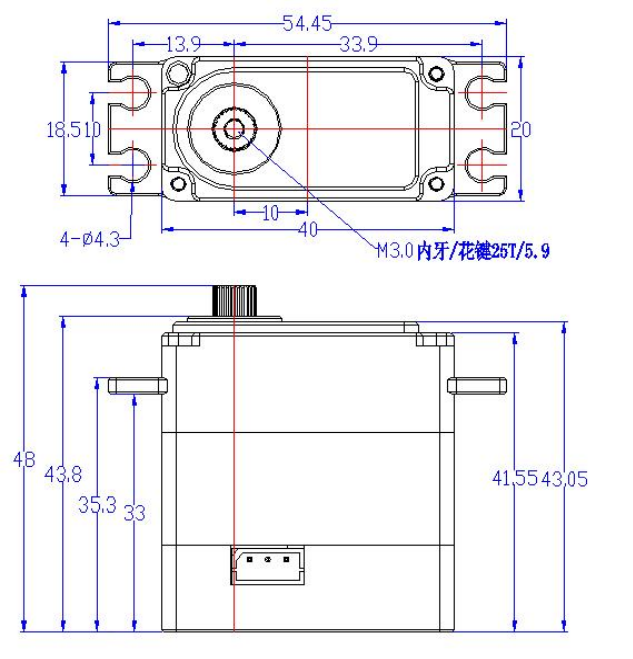
尺寸 Size: |
A:40mm B:20mm C:43.05mm |
|
重量 Weight: |
89± 1g |
| 齿轮类型 Gear type: | 钢 Steel |
| 机构极限角度 Limit angle: |
No limit |
| 轴承 Bearing: | 滚珠轴承 Ball bearings |
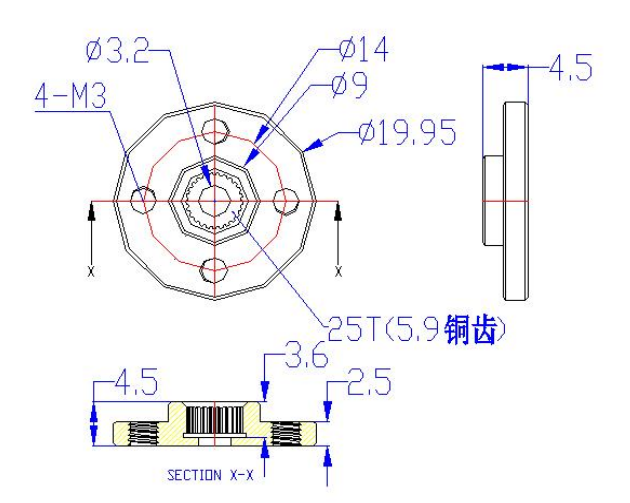
| 出力轴 Horn gear spline: | 25T/OD5.9mm |
| 减速比Gear Ratio: | 1/378 |
| 摇臂虚位The rocker phantom: | 0° |
| 外壳 Case: | Aluminium |
| 舵机线 Connector wire: | 15CM |
| 马达 Motor: | Coreless Motor |
|
额定工作电压 Rated Input Voltage: |
5V-8.4V |
|
空载速度 No load speed: |
0.22sec/60°(45RPM)@7.4V |
| 空载电流 Runnig current(at no load) : | 150mA@7.4V |
|
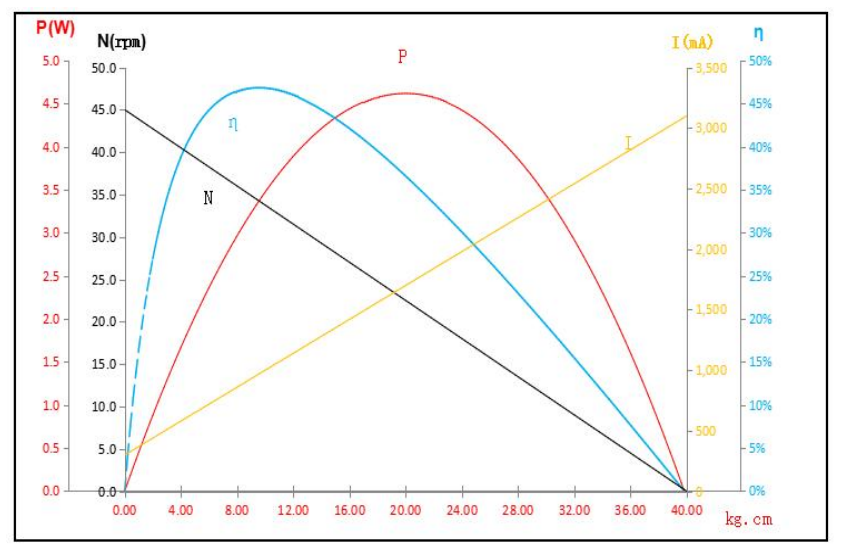
堵转扭矩 Peak stall torque: |
40kg.cm@7.4V |
| 堵转电流 Stall current: | 3.3A@7.4V |
| 额定负载Rated Load: | 10kg. cm@7.4V |
| 额定电流Rated current: | 850mA@7.4V |
| KT常数 | 12.0kg. cm/A |
| 电机内阻Terminal resistance: | 1.02 Ω |
| 运行模式 Operating Modes: |
模式0:角度伺服模式 (默认此模式,0-360度[敏感词]位置可控) Mode 0: Angle servo mode (default mode, absolute position controllable from 0-360 degrees) |
|
模式1:电机恒速模式(电机恒速模式,随负载增加,速度维持不减速) Mode 1: Motor constant speed mode (motor constant speed mode, maintains speed without deceleration as the load increases) |
|
|
模式2:电机恒流模式(电机恒流模式,随负载增加,电流维持不减) Mode 2: Motor constant current mode (motor constant current mode,maintains current without decreasing with increasing load) can achieve absolute position |
|
| 多圈模式 Multi-Loop Mode: |
[敏感词]精度下可以正负7圈[敏感词]位置控制,但掉电圈数不保存(扩大分辨率,圈数可翻倍) control of positive and negative 7 turns at the highest accuracy, but the umber of power failure turns is not saved (the resolution can be expanded, and the number of turns can be doubled) |
| 恒力输出 Constant force output: |
设定输出扭矩值,舵机可保持该扭矩(44号地址输入相对应的目标扭矩值,舵机可保持该扭矩) Set the output torque value, the servo can maintain this torque (input the target torque value corresponding to address 44, the servo can maintain this torque) |
| 控制信号 Command signal: | Digital Packet |
| 协议类型 Protocol Type: | Half Duplex Asynchronous Serial Communication |
| ID范围 ID range: | 0-253 |
| 通读速率 Communication Speed: | 38400bps ~ 1 Mbps |
| 控制算法 Control Algorithm: | PID |
| 中位 Neutral Position: | 180°(2048) |
|
旋转角度 Running degree: |
360° (when 0~4096) |
| 电子分辨率 Resolution [deg/pulse] | 0.088°(360°/4096) |
| 旋转方向 Rotating Direction: | Clockwise(0→4096) |
|
反馈 Feedback: |
Load(负载), Position(位置),Speed(工作速度), Input Voltage(输入电压),Current(工作电流),Temperature(工作温度) |
| 详细规格书下载Download detailed specifications: | |
| 外形图 The Drawings: |